A WORK IN PROGRESS
PIC 16F690 Engine Timer
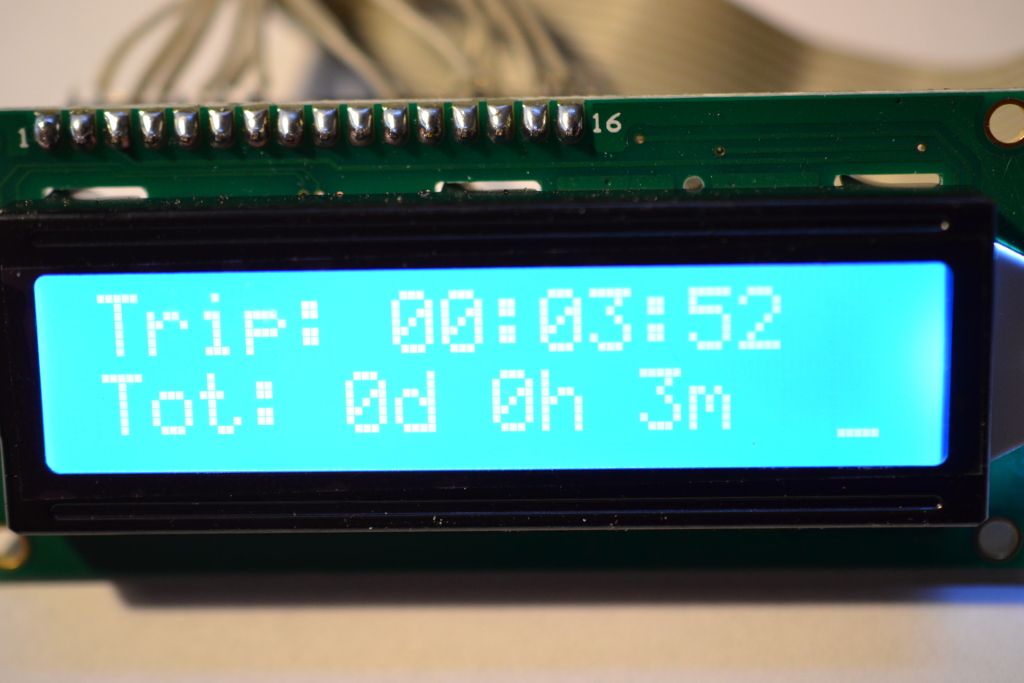
This is a timer circuit, using the PIC 16F690s timer and EEPROM. When it's powered on, A short message is shown, and it starts to count seconds. Seconds are getting into minutes, and minutes are getting into hours. Hours are getting into days.
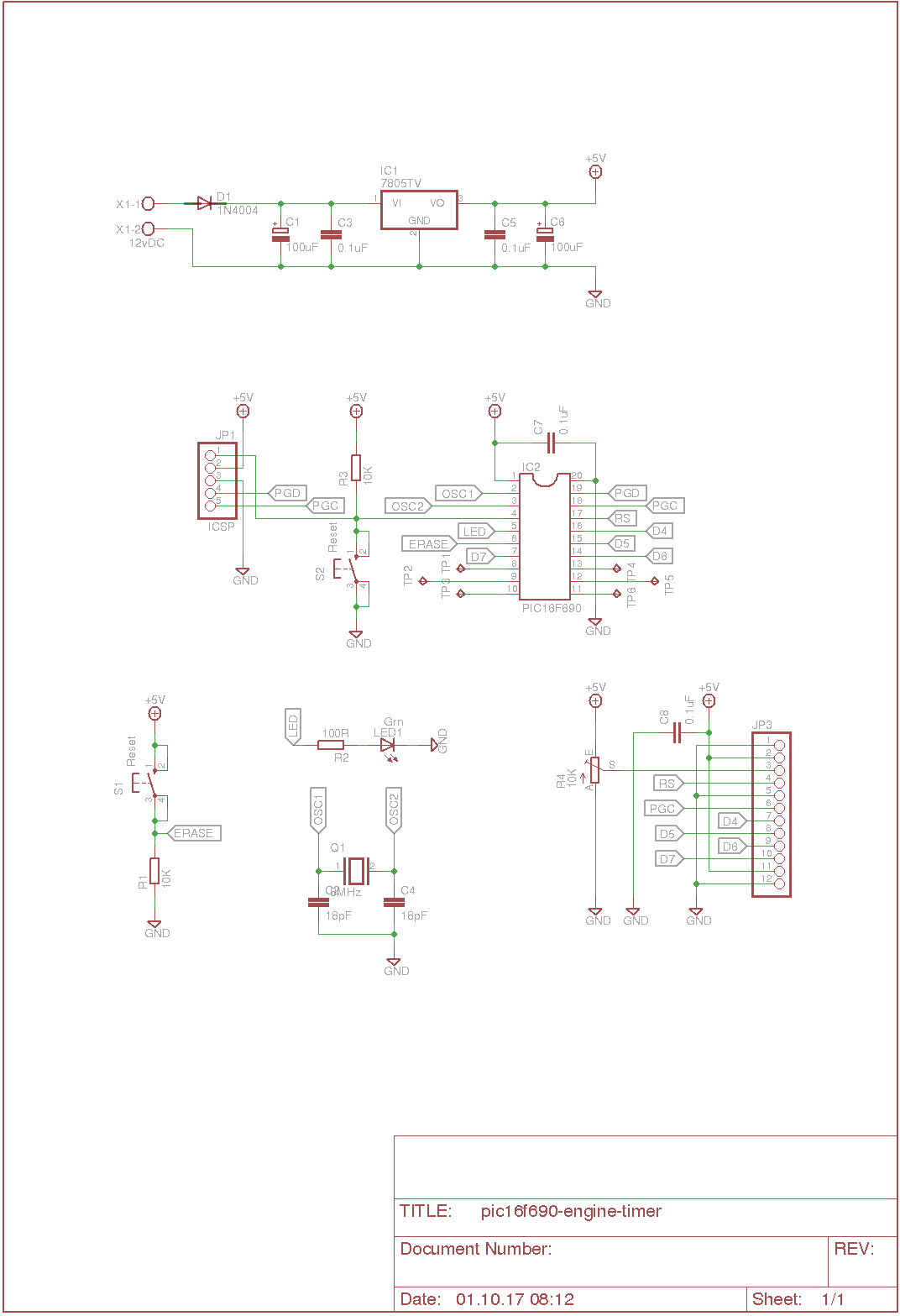
The hardware
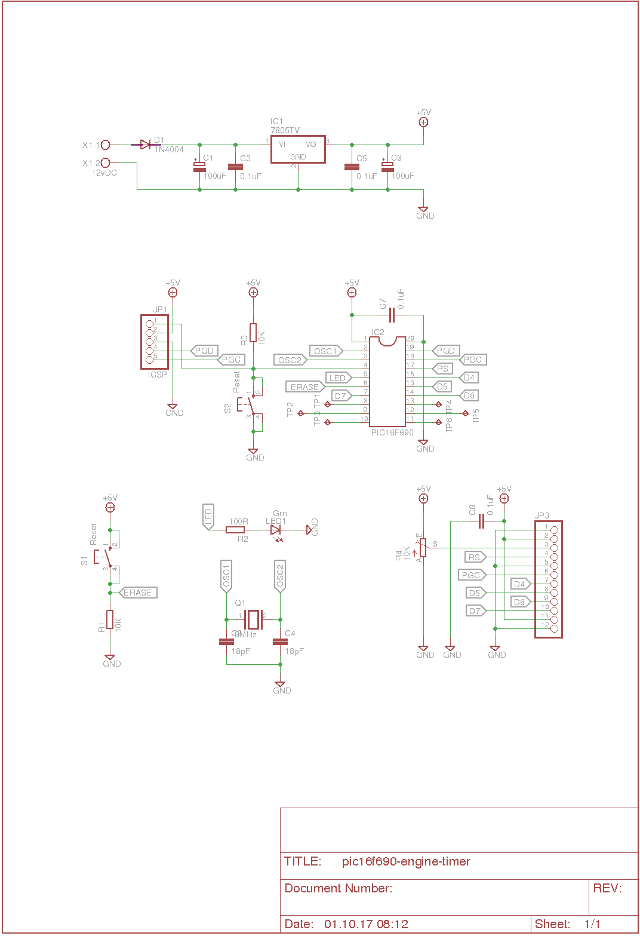
Click here for a bigger view.
{kind=link}
When the schematic is done, it's time to do some PCB layout design. This is a tedious job, and I usually spend a few days doing it. After the schematic is done, I do a preliminary layout of the board. Then I wait a day or two, and then I pick up where I left. Often I see some stupid mistake. But in the end. I pretty satisfied with the board, and I etch it.
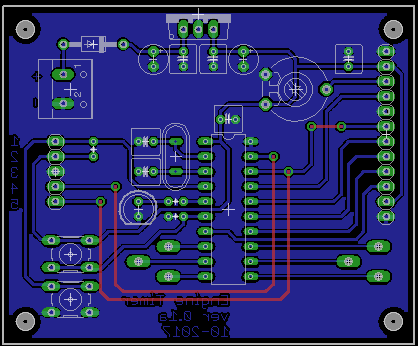
This layout is what I ended up with.
Parts, package and libraries:
Part Value Device Package Library Sheet
C1 100uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C2 18pF C-EU025-050X050 C025-050X050 rcl 1
C3 0.1uF C-EU025-050X050 C025-050X050 rcl 1
C4 18pF C-EU025-050X050 C025-050X050 rcl 1
C5 0.1uF C-EU025-050X050 C025-050X050 rcl 1
C6 100uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C7 0.1uF C-EU025-050X050 C025-050X050 rcl 1
C8 0.1uF C-EU025-050X050 C025-050X050 rcl 1
D1 1N4004 1N4004 DO41-10 diode 1
IC1 7805TV 7805TV TO220V linear 1
IC2 PIC16F690 DIL20 DIL20 ic-package 1
JP1 ICSP PINHD-1X5 1X05 pinhead 1
JP3 PINHD-1X12 1X12 pinhead 1
LED1 Grn LED5MM LED5MM led 1
Q1 8MHz XTAL/S QS special 1
R1 10K R-EU_0204/2V 0204V resistor 1
R2 100R R-EU_0204/2V 0204V resistor 1
R3 10K R-EU_0204/2V 0204V resistor 1
R4 10K TRIM_EU-LI10 LI10 pot 1
S1 Reset 10-XX B3F-10XX switch-omron 1
S2 Reset 10-XX B3F-10XX switch-omron 1
TP1 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
TP2 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
TP3 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
TP4 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
TP5 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
TP6 TPPAD1-13Y TPPAD1-13Y P1-13Y testpad 1
X1 12vDC W237-102 W237-102 con-wago-500 1
Some pictures
Software
When the hardware is all done, and every component is soldered on, it's time for the software.
// INCLUDING LIBRARIES
#include <xc.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
// CONFIGURATION BITS
#pragma config FOSC = XT // Oscillator Selection bits (HS oscillator: High-speed crystal/resonator on RA4/OSC2/CLKOUT and RA5/OSC1/CLKIN)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled and can be enabled by SWDTEN bit of the WDTCON register)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config MCLRE = ON // MCLR Pin Function Select bit (MCLR pin function is MCLR)
#pragma config CP = OFF // Code Protection bit (Program memory code protection is disabled)
#pragma config CPD = OFF // Data Code Protection bit (Data memory code protection is disabled)
#pragma config BOREN = ON // Brown-out Reset Selection bits (BOR enabled)
#pragma config IESO = ON // Internal External Switchover bit (Internal External Switchover mode is enabled)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enabled bit (Fail-Safe Clock Monitor is enabled)
#pragma warning disable 373 // disable warning 373
#pragma warning disable 359 // disable warning 359
#pragma warning disable 355 // disable warning 355
// DEFINITIONS
#define _XTAL_FREQ 8000000 // Compiler reference
#define LCD_RS RA2 // LCD Register Select pin
#define LCD_EN RA1 // LCD Enable pin
#define LCD_DATA PORTC // LCD datapins are connected here
#define number 0x30 //
// VARIABLES
volatile char counter, buffer[3];
volatile int
seconds = 0,
minutes = 0,
hours = 0,
tot_days = 0,
tot_hours = 0,
tot_minutes = 0;
unsigned int len, i;
unsigned char days_adr = 0x00;
unsigned char hours_adr = 0x10;
unsigned char minutes_adr = 0x20;
// FUNCTION PROTOTYPE
void interrupt ISR();
void check_for_erase();
unsigned char eeprom_read_data(unsigned char address);
void eeprom_write_data();
void eeprom_writestr(unsigned char msg[], unsigned char address);
void lcd_clear();
void lcd_goto(unsigned char pos);
void lcd_init();
void lcd_putch(char c);
void lcd_puts(const char* s);
int lcd_strobe(void);
void lcd_write(unsigned char c);
void osc_init();
void read_total_run_time();
void short_welcome();
void show_time();
void timer_init();
void update_time();
void show_total_time();
void write_time_to_eeprom();
// FUNCTIONS
// Function to strobe LCD, "pings" the En-pin
int lcd_strobe(void)
{
LCD_EN = 1;
__delay_us(1);
LCD_EN = 0;
}
// Function to write on the LCD
void lcd_write(unsigned char c)
{
__delay_ms(1);
LCD_DATA = ((c >>4) & 0x0f);
lcd_strobe();
LCD_DATA = (c & 0x0f);
lcd_strobe();
}
// Function to reset/clear the LCD
void lcd_clear(void)
{
LCD_RS = 0;
lcd_write(0x1);
__delay_ms(1);
}
// Function to write a string to the LCD
void lcd_puts(const char *s)
{
LCD_RS = 1;
while(*s)
lcd_write(*s++);
}
// Functionto write one char on the LCD
void lcd_putch(char c)
{
LCD_RS = 1;
lcd_write(c);
}
// FUnction to place cursor on the LCD
void lcd_goto(unsigned char pos)
{
LCD_RS = 0;
lcd_write(0x80+pos);
}
// Function to initialze the LCD
void lcd_init(void)
{
char init_value;
init_value = 0x3;
LCD_RS = 0;
LCD_EN = 0;
__delay_ms(15);
LCD_DATA = init_value;
lcd_strobe(); __delay_ms(10);
lcd_strobe(); __delay_ms(10);
LCD_DATA = 2;
lcd_strobe();
lcd_write(0x0e); // display on, cursor on, blink off
}
// Function to initialize the oscillator
void osc_init(void)
{
OSCCONbits.IRCF = 0b111; // 8MHz
OSCCONbits.OSTS = 1; // Running from Fosc in config/ External clock
OSCCONbits.HTS = 1; // stable
OSCCONbits.SCS = 0; // Clock source def by Fosc
return;
}
// Function to handle timer 1 interrupts
// Counter = Fosc/instruction cycle * prescaler * timer1 resolution
// Counter = 8MHz / (4 intrstructions pr cycle * 1 prescaler value * 2^16resolution)
// Counter = 8000000 / (4 * 1 * (2^16))
// Counter = 30.51
void interrupt ISR()
{
if (PIR1bits.TMR1IF == 1) // Timer1 overflow interrupt flag
{
counter++;
if (counter == 30) // Check if TMR1 have overflown
{
PORTCbits.RC5 ^= 1; // Toggle LED
update_time();
show_time();
show_total_time();
write_time_to_eeprom();
counter = 0; // Reset counter
}
PIR1bits.TMR1IF = 0; // Clear the overflow flag
}
if (PORTCbits.RC4) // Check if RC4 is high
{
lcd_clear();
check_for_erase();
}
}
// Function to initialize the timer
void timer_init()
{
TMR1H = TMR1L = 0; // Clear TMR1H and TMR1L
T1CONbits.T1CKPS1 = 0; // Prescaler 1:1
T1CONbits.T1CKPS0 = 0; // Prescalre 1:1
PIE1bits.TMR1IE = 1; // TMR1 overflow interrupt enable bit
T1CONbits.TMR1ON = 1; // Timer 1 on
INTCONbits.PEIE = 1; // Enable perepherial interrupt
INTCONbits.GIE = 1; // Enable global interrupt
}
// Function to show initial information
void short_welcome(void)
{
lcd_clear();
lcd_goto(0);
lcd_puts(" Engine timer ");
lcd_goto(0x40);
lcd_puts(" ver 0.1a ");
__delay_ms(3000);
lcd_clear();
}
// Function to show the time
void show_time()
{
lcd_goto(0);
lcd_puts("Trip: ");
itoa(buffer, hours,10);
if (hours < 10)
{
lcd_puts("0");
}
lcd_puts(buffer);
lcd_puts(":");
itoa(buffer, minutes, 10);
if (minutes < 10)
{
lcd_puts("0");
}
lcd_puts(buffer);
lcd_puts(":");
itoa(buffer, seconds, 10);
if (seconds < 10)
{
lcd_puts("0");
}
lcd_puts(buffer);
}
// Function to display the total run time
void show_total_time()
{
lcd_goto(0x40);
lcd_puts("Tot: ");
itoa(buffer, tot_days, 10);
lcd_puts(buffer);
lcd_puts("d ");
itoa(buffer, tot_hours, 10);
lcd_puts(buffer);
lcd_puts("h ");
itoa(buffer, tot_minutes, 10);
lcd_puts(buffer);
lcd_puts("m ");
}
// Function to update the time
void update_time()
{
seconds++;
if (seconds == 60)
{
minutes += 1;
tot_minutes += 1;
seconds = 0;
}
if (minutes == 60)
{
hours += 1;
minutes = 0;
}
if (hours == 24)
{
hours = 0;
}
if (tot_minutes == 60)
{
tot_hours += 1;
tot_minutes = 0;
}
if (tot_hours == 24)
{
tot_days += 1;
tot_hours = 0;
}
}
// Function to write the total run time to eeprom.
void write_time_to_eeprom()
{
itoa(buffer, tot_days, 10);
eeprom_writestr(buffer, days_adr);
if (tot_days < 10) // CHeck if buffer is > 10
{
EEADR = 0x01; // If so, write 0xFF
EEDATA = 0xFF; // To the second day_adr
eeprom_write_data();
}
itoa(buffer, tot_hours, 10);
eeprom_writestr(buffer, hours_adr);
if (tot_hours < 10)
{
EEADR = 0x11;
EEDATA = 0xFF;
eeprom_write_data();
}
itoa(buffer, tot_minutes, 10);
eeprom_writestr(buffer, minutes_adr);
if (tot_minutes < 10)
{
EEADR = 0x21;
EEDATA = 0xFF;
eeprom_write_data();
}
}
// Function to write data to EEPROM
void eeprom_write_data()
{
EECON1bits.EEPGD = 0; // Program or data memory access bit. 0 = access data
EECON1bits.WREN = 1; // Write enable bit
INTCONbits.GIE = 0; // Disable gloab interrupt
INTCONbits.PEIE = 0; // Disable perepherial interrupt
EECON2 = 0x55; // Has to be written, read the manual
EECON2 = 0xAA; // Has to be written, read the manual
EECON1bits.WR = 1; // Write control bit. 1 = initiate write cycle
INTCONbits.GIE = 1; // Enable global interrupt
INTCONbits.PEIE = 1; // Eneable perepheral interrupt
while (!PIR2bits.EEIF); // EE Write operation interrupt flag
PIR2bits.EEIF = 0; // Write operation has not completed or has not started
}
// Function to write a string to the EEPROM
void eeprom_writestr(unsigned char msg[], unsigned char address)
{
len = strlen(msg);
for (i=0; i<len; i++)
{
EEADR = address + i; // EEADR -> Actual memory address
EEDATA = msg[i]; // EEDATA -> Data to be written
eeprom_write_data(msg[i]);
}
EECON1bits.WREN = 0; // Write enable bit
}
// Function to read from teh EEPROM
unsigned char eeprom_read_data(unsigned char address)
{
volatile unsigned char retval;
unsigned char save_gie;
save_gie = INTCONbits.GIE;
EEADR = address; // EEPROM address to be read
EECON1bits.RD = 1; // EEPROM Read control bit. 1 = initiate a memory read
retval = EEDATA; // Read value
return retval;
}
// Function to erase EEPROM data
void check_for_erase()
{
T1CONbits.TMR1ON = 0; // Turn TMR1 off
lcd_puts(" ERASE ALL! ");
EEDATA = 0xFF; // Value to write
EEADR = 0x00;
eeprom_write_data();
EEADR = 0x01;
eeprom_write_data();
EEADR = 0x10;
eeprom_write_data();
EEADR = 0x11;
eeprom_write_data();
EEADR = 0x20;
eeprom_write_data();
EEADR = 0x21;
eeprom_write_data();
__delay_ms(1000);
lcd_goto(0x40);
lcd_puts(" PRESS RESET. ");
while(1);
}
// Function to read EEPROM and the total run time, in seconds
void read_total_run_time()
{
buffer[0] = eeprom_read_data(0x00);
buffer[1] = eeprom_read_data(0x01);
tot_days = atoi(buffer); // Convert the data to int so we can do some math
buffer[0] = eeprom_read_data(0x10);
buffer[1] = eeprom_read_data(0x11);
tot_hours = atoi(buffer);
buffer[0] = eeprom_read_data(0x20);
buffer[1] = eeprom_read_data(0x21);
tot_minutes = atoi(buffer);
}
// MAIN PROGRAM
void main(void) {
TRISA = 0b00000000; // TRISA output
PORTA = 0b00000000; // PORTA low
TRISB = 0b0000; // RX+TX = in, rest out
PORTB = 0b0000; // PORTB low
TRISC = 0b00010000; // RC4 set to input -> Erase button
PORTC = 0b00000000; // PORTC low
ANSEL = 0; // Disable the input buffer on ANSEL
ANSELH= 0; // Disable the input buffer on ANSELH
CM1CON0 = 0; // Comparator C1 control register 0, disabled
CM2CON0 = 0; // Comparator C2 control register 0, disabled
osc_init(); // Initialize the oscillator
lcd_init(); // Initialize the LCD
short_welcome(); // Show welcome
read_total_run_time(); // Read total run time from eeprom
timer_init(); // Initialize and start the timer
while(1) // Do this forever...
{
// nothing to do, everything is done with timer1/interrupt
}
return;
}
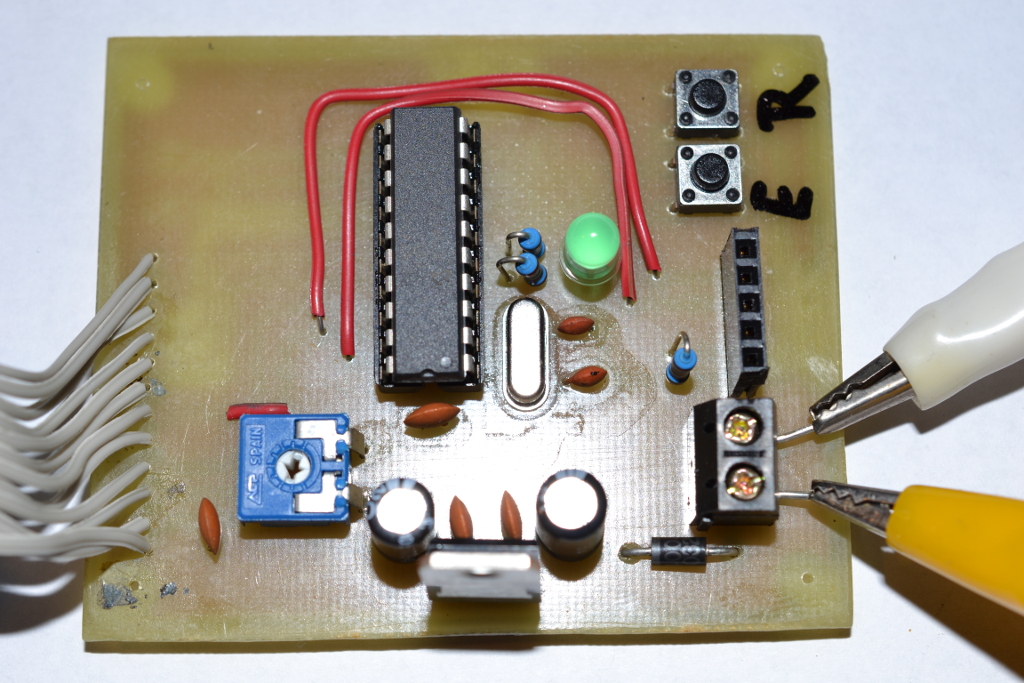
Pictures
Pictures tells a thousand words:
This is the component side of the circuit.
This is the LCD.